Hi guys,
Last weekend my partner and I went to an event called Hybrid World Adelaide. Within this event was individual workshops and events. My partner and I did one where we made / assembled a robot each. These robots are called FHTbot and were created by Hackerspace Adelaide and Flinders University. These robots work on WiFi and you connect to them and then control them via your phone etc just like you would connect to a WiFi connection. Us and the other participants all had to name our robots individually and this is the name that shows up for the connection on your phone or other device.
My partner named his Connor after the game Detroit: Become Human.
I named mine Bender after the show Futurama.
They take batteries and have a left and a right motor.
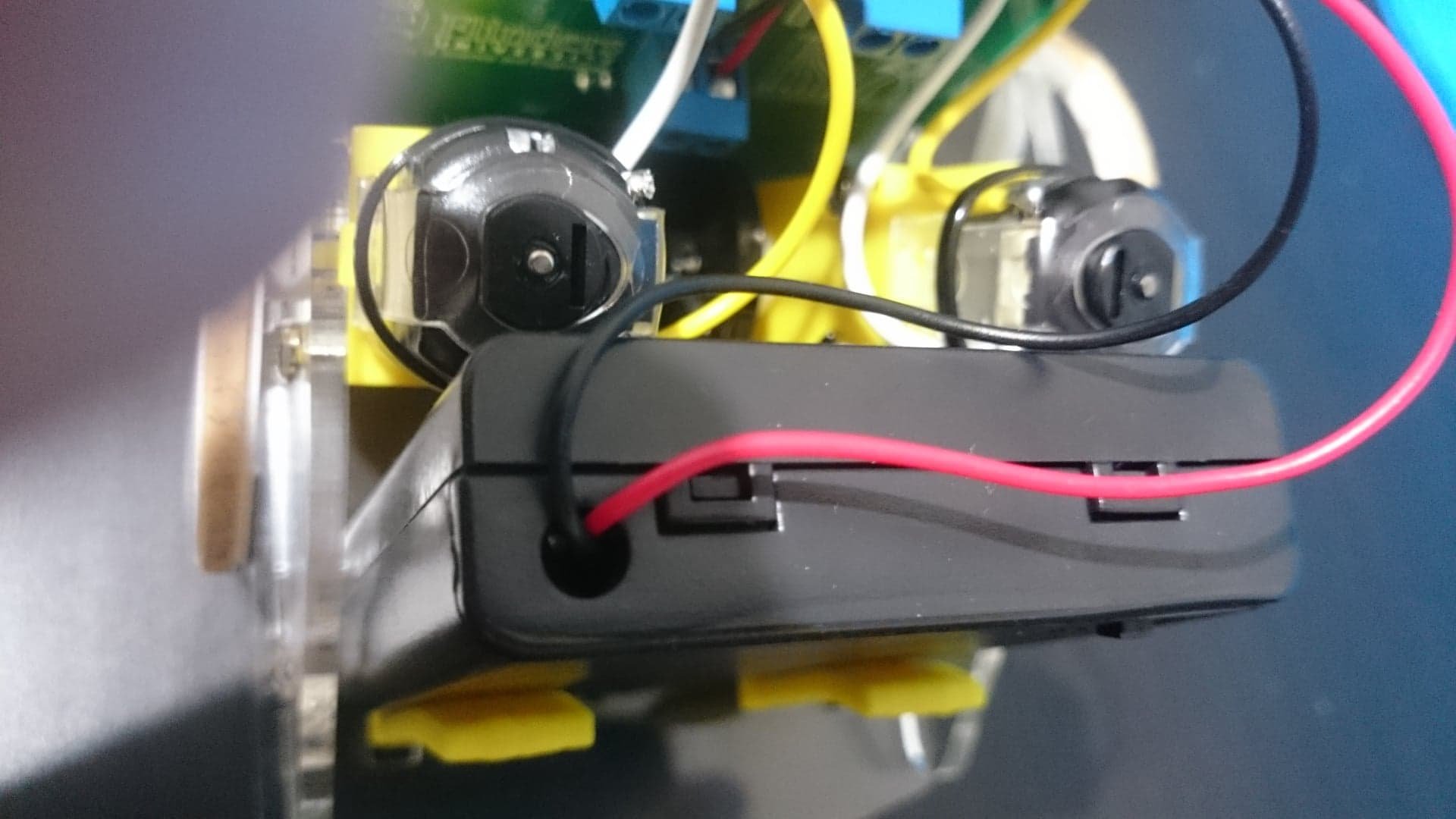
The battery holder is the black box and the yellow parts are the motors.
There are two main ways of controlling / programming these robots. The robots come with their own system for controlling them that you access through your browser when connected to them. This system that comes with the robots is found at www.fhtbot.com while connected to the robot (if you are connected to the internet instead, it will bring up a page talking about the robot). The functionality within this system is set up to make it similar to a remote control car except it has sensors to prevent running into things. There is the option to control it with no driver assist, in which case, it would just run into things if you crashed into it rather than using its sensors to avoid crashing. However there is a driver assist option, which lets you control its movement using your finger on the phone / tablet etc just like in the other mode, but it will also detect obstacles and flash red lights and reverse away from the obstacle it detected. It also has an obstacle avoidance mode in which you do not control it and it just moves around on its own but it avoids obstacles using the sensors.
It has two sensors for detecting obstacles. One of these is the one up the top (what looks like eyes):
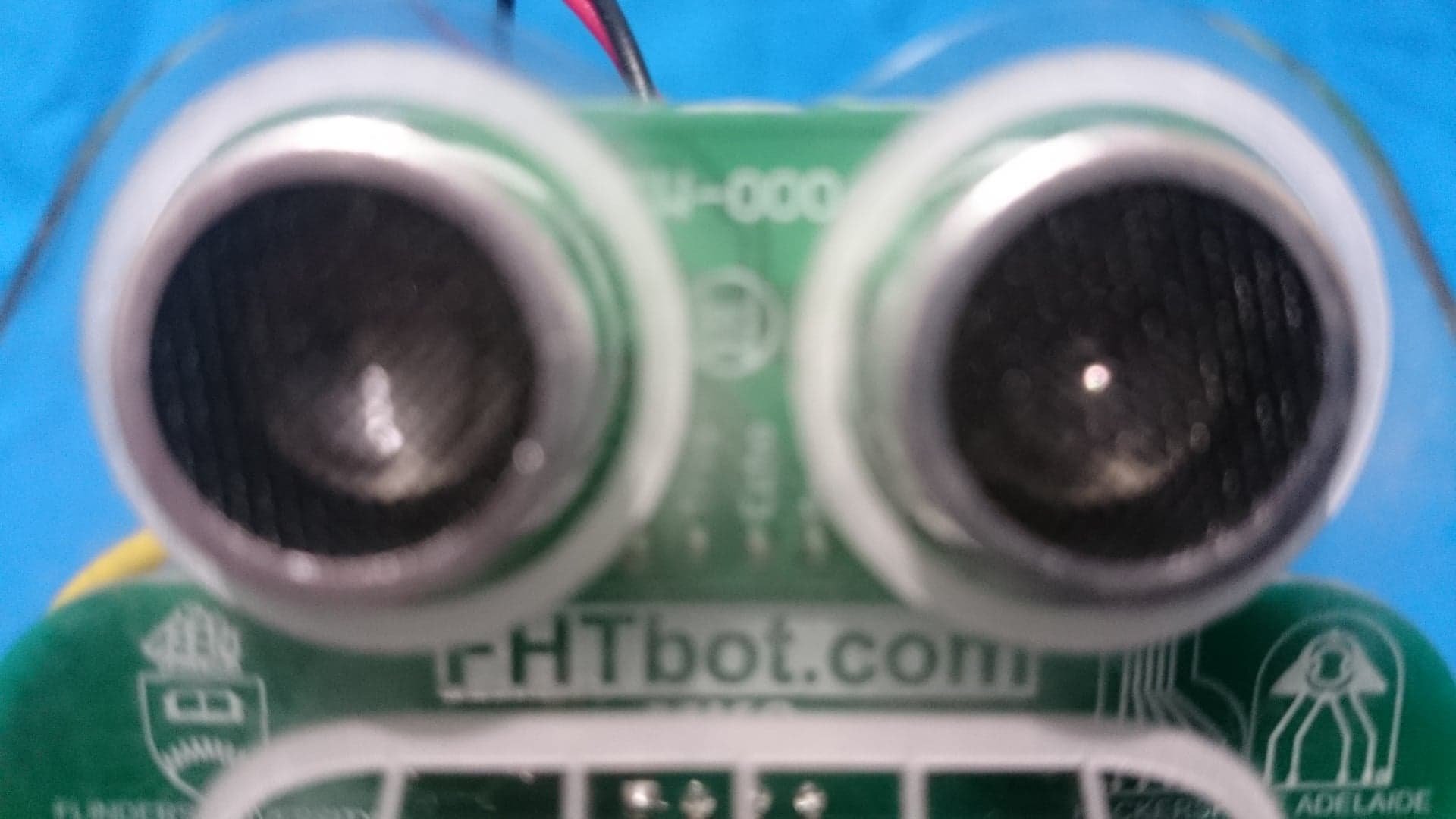
The other one is down the bottom and is more of a manual type of sensor.
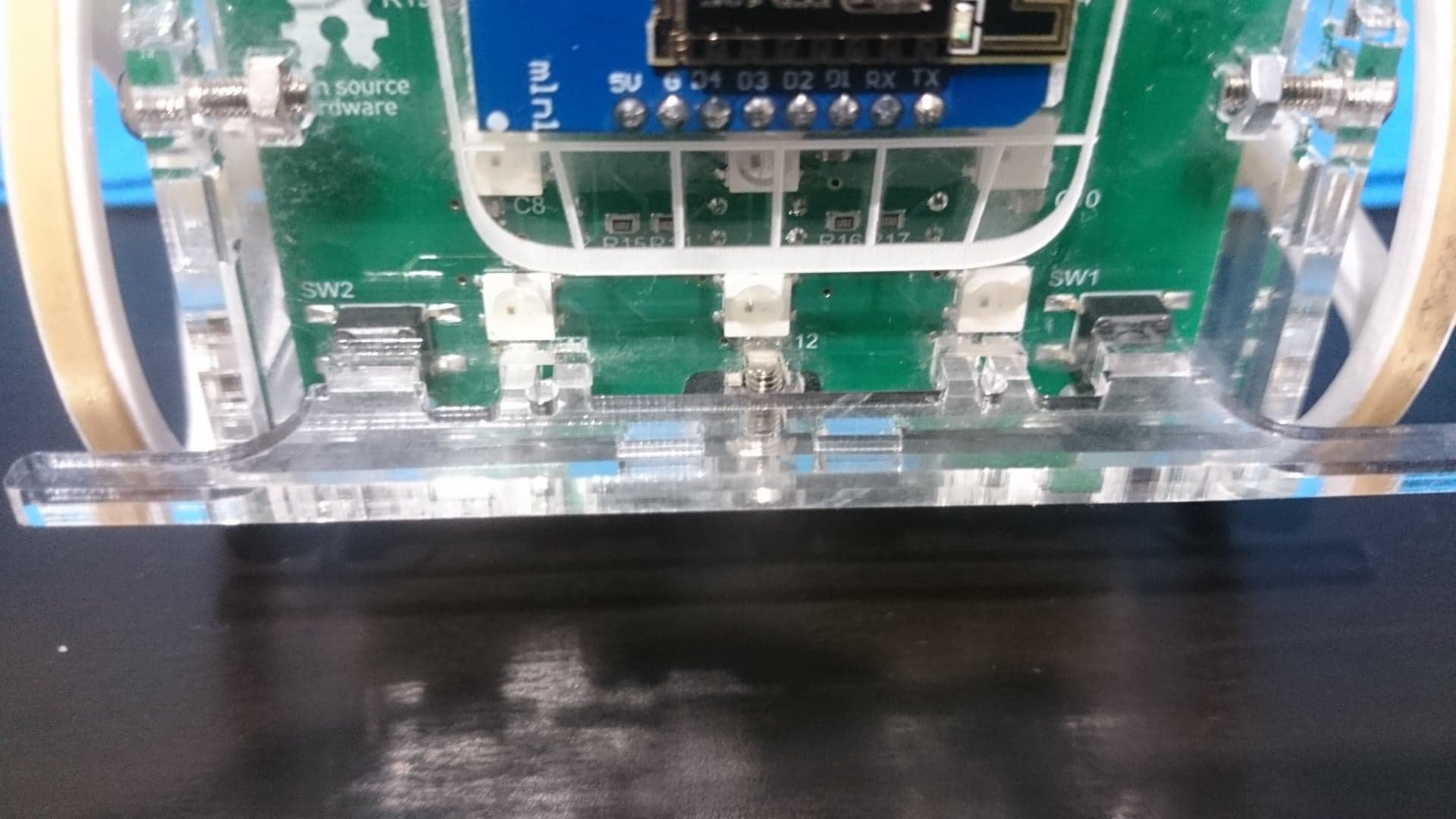
This is a sensor bar to detect low things in front of it. If the bar hits something, it will push the bar inwards, towards Bender's body. Out of the four bits that slot into Bender's front to hold the bar in place, the most outer ones on each side sit over a button on the main board each. If the bar gets pushed in by running into something, it will push back on these buttons, communicating that there is an obstacle there and triggering the reversing behaviour of the bot.
This is the basics of the remote control car style functionalities of the system that comes with fht bot. However, the system also has two other options. One is "turtle mode" which lets you get a bit more "programmy" with the bot. You don't need to know actual programming languages in order to use this mode, but it does use programming logic and it allows you to create larger amounts of input before the bot performs it. It uses blocks to easily show a lot of the logic used in programming, including stuff like if statements. It is similar to Scratch.
An example of this is making it move in a square.
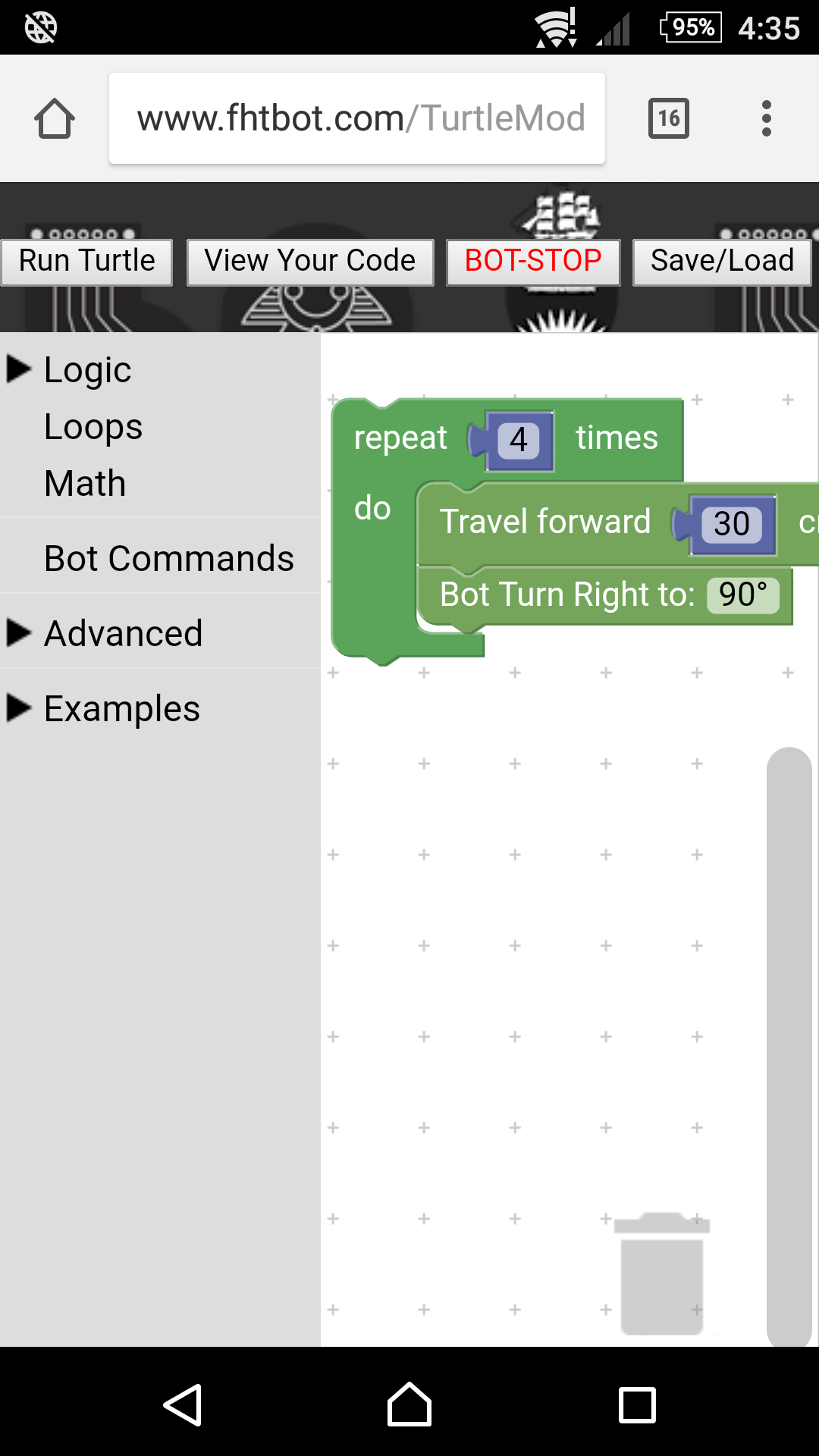
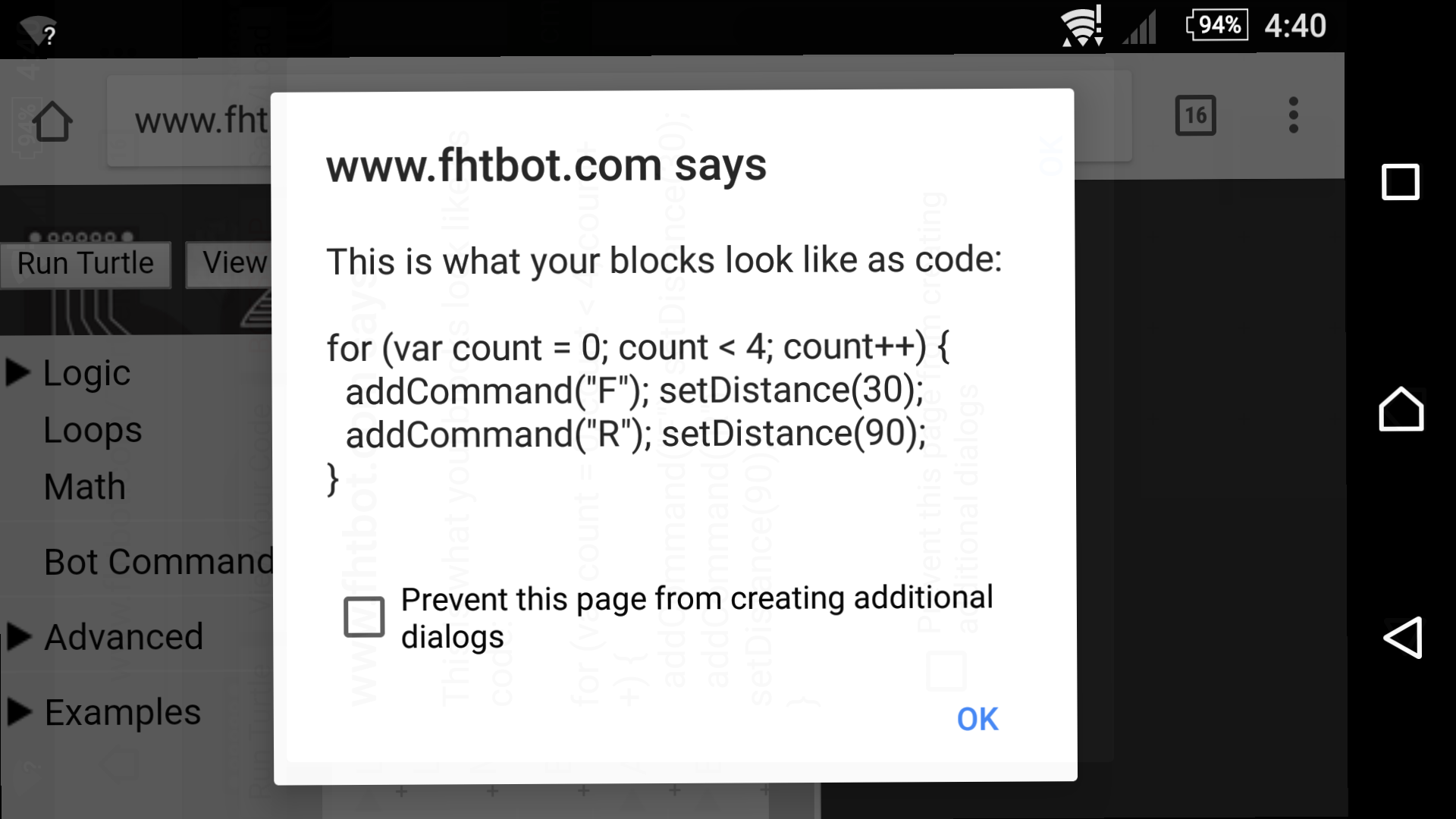
Here it is saying that it must travel 30 cm and turn 90 degrees 4 times. You can also press on view your code and it will show you what you have created in code instead of blocks.
Here is the code for making the robot travel in a square:
The other thing it can do is make sounds. I don't know how it does this. It is made up of beeps though and I think that is a big part of why it is able to make sounds.
Here is a video of Bender singing the Imperial March.
YouTube version:
Dlive version:
https://dlive.io/video/birchmark/9c596e20-8e4e-11e8-b2de-f7be8f055a16
This is about the whole of what the robot can do using the webpage that comes with it, but there is more. The FHTbot is Arduino based so it is possible to download Arduino software and various libraries to program the robot to do other things. This would involve the use of more complicated programming, including using programming languages. I am not sure about this as I haven't looked into Arduino myself, but I have heard that web languages are sometimes used in Arduino programming. I am not sure what the limits of what Connor and Bender will be able to do using Arduino would be, but I am keen to find out. It would be cool to see what else they are capable of.
Thank you for reading my post. I hope you enjoyed it.
LINKS
Birchmark Website / Portfolio: http://birchmark.com.au/
Dlive: https://dlive.io/@birchmark
YouTube: https://www.youtube.com/c/BirchmarkAu
Patreon: https://www.patreon.com/Birchmark
Subreddit: https://www.reddit.com/r/Birchmark/
Twitter: https://twitter.com/Birchmark_
Facebook: https://www.facebook.com/birchmark/
Redbubble: https://www.redbubble.com/people/birchmark?asc=u
Threadless: https://birchmark.threadless.com/
Dailymotion: http://www.dailymotion.com/Birchmark
Please consider commenting, upvoting or resteeming this post if you enjoyed the chapter. Thank you for reading!
ANOTHER POST OF MINE YOU MIGHT ENJOY: @birchmark/confusing-earth-chapter-25-scram
A POST I ENJOYED BY SOMEONE ELSE: @gamersclassified/wrecking-ball-s-new-cosmetics-are-on-the-ptr